Motorcortex provides a comprehensive Software Development Kit (SDK) that enables clients to build their own high‑performance control applications on top of the Motorcortex real‑time platform.
SDK overview
The Motorcortex SDK includes all tools needed to design, build, debug, and deploy embedded motion and machine control software, tightly integrated with the Motorcortex‑Core real‑time operating system and middleware. It is based on CMake and supports popular IDEs such as Visual Studio Code and CLion, making it easy to integrate into existing development workflows.
Included libraries
The SDK ships with pre‑compiled Motorcortex libraries:
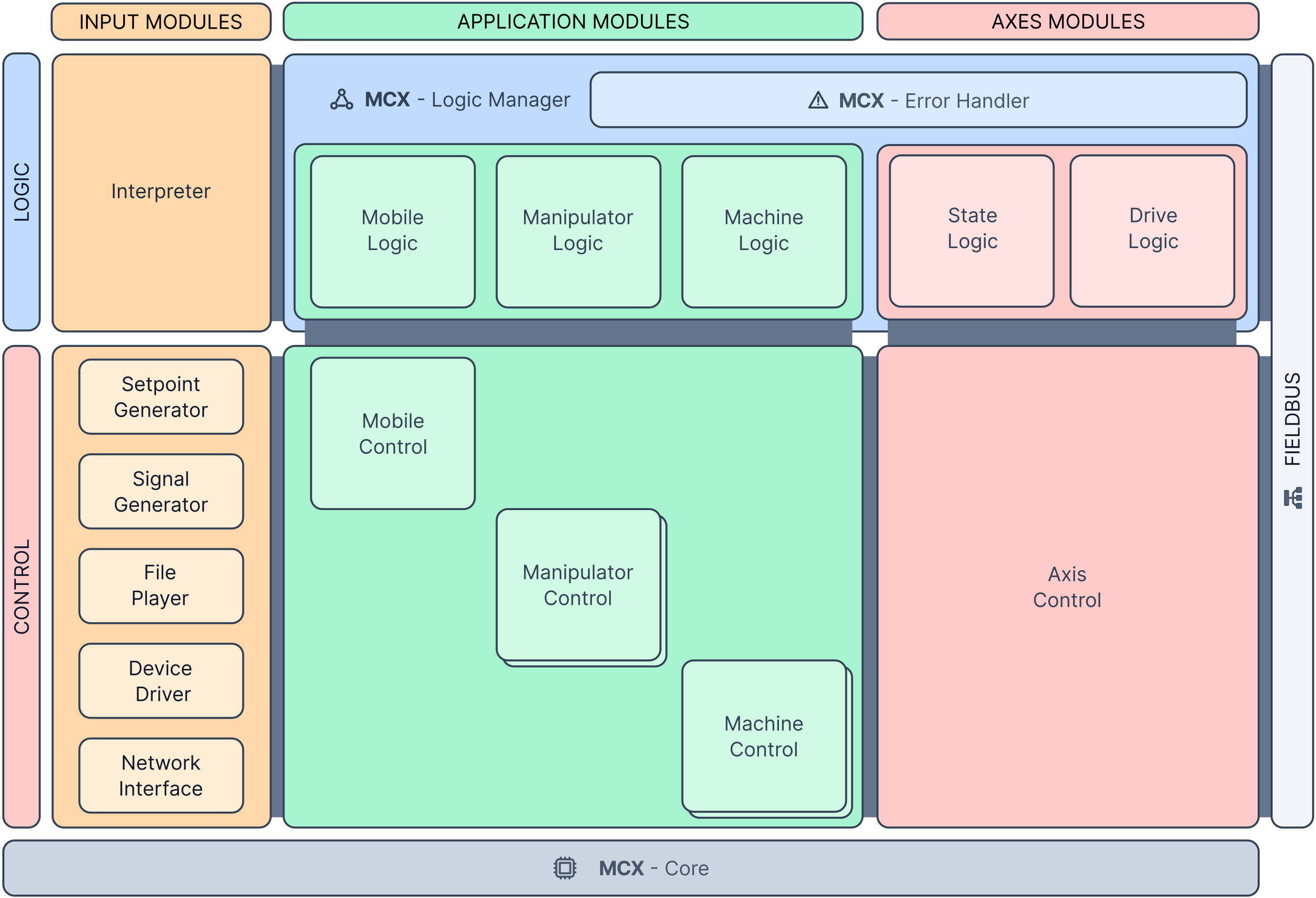
Core; abstractions for Realtime, Middleware, EtherCAT, Servo-Drives, Logic and Error Handling
Math; realtime capable math library with Matrix calculus and kinematics primitives
Control; modules for signal processing and control (filters, switches, limiters, controllers)
Mechanics; kinematic solvers for serial, parallel mechanisms and vehicles, rigid body simulation
Motion; motion and trajectory planning
IO; drivers for various devices like joysticks, IMUs and more
Each library is designed for deterministic performance on MCX‑RTOS and compatible x86/ARM hardware, allowing you to focus on application logic instead of infrastructure.
Header files and APIs
Alongside the libraries, the SDK provides the full set of C/C++ header files that expose the Motorcortex APIs. These headers give direct access to real‑time tasks, communication, signals, parameters, and hardware interfaces, so you can implement custom functionality while remaining fully compatible with the Motorcortex runtime.
Application Templates
To accelerate your development even further, part of the SDK is also an Application Template, which is a ready-to build Motorcortex-Robot App, provided as a source-code project. This Template is built upon years of in-house application experience and includes the same features as Motorcortex-Robot. On request a custom Template can be built that may only contain a subset of the fully featured applicaion.
Licensing model
To develop with the Motorcortex SDK, you acquire a one‑time SDK license, complemented by an annual maintenance fee that gives access to updates, improvements, and support. Each deployed application that links against the Motorcortex libraries requires a per‑library runtime license, ensuring that every installation is properly licensed while keeping development access straightforward for your team.